03. Keypoint Detection
Keypoint Detection
ND313 C03 L04 A07 C43 Intro
TASK MP.2
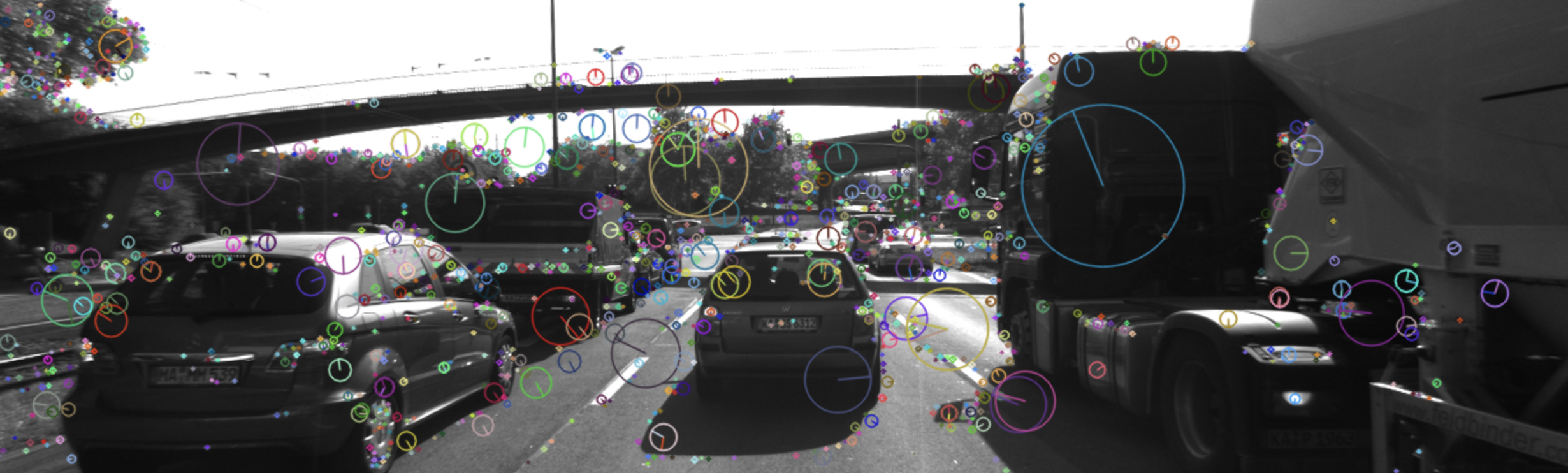
Your second task is to focus on keypoint detection. In the student version of the code you will find an existing implementation of the Shi-Tomasi detector. Please implement a selection of alternative detectors, which are HARRIS, FAST, BRISK, ORB, AKAZE, and SIFT. The following figure shows keypoints detected with the SIFT method.
The Harris detector is already familiar to you from a previous exercise and the other methods are available in the OpenCV. Also, please adjust the project code in a way that each detector can be selected by setting the string 'detectorType' to the respective name. Please note that all detectors should be added to the file 'matching2D_student.cpp'. Take a look at the header file 'matching2D.hpp' for details on the call parameters for the functions you need to implement.
TASK MP.3
In a later part of the mid-term project, you will be evaluating the various detectors and descriptors with regard to a set of performance metrics. As we are focussing on a collision detection system in this course, keypoints on the preceding vehicle are of special interest to us. Therefore, in order to enable a more targeted evaluation, we want to discard feature points that are not located on the preceding vehicle.
Your third task therefore is to remove all keypoints outside of a bounding box around the preceding vehicle. Box parameters you should use are : cx = 535, cy = 180, w = 180, h = 150.
Please note that this cropping of feature points should only be used for evaluation purposes in the mid-term project. For later sections of this course, especially in the final project, please disable keypoint cropping using this method. Also, there will be keypoints within the box that are e.g. on the road surface or on other vehicles. Please keep an eye on their number in relation to keypoints on the actual vehicle and discuss this later in the evaluation part of the mid-term project.